LIDAR Scanner
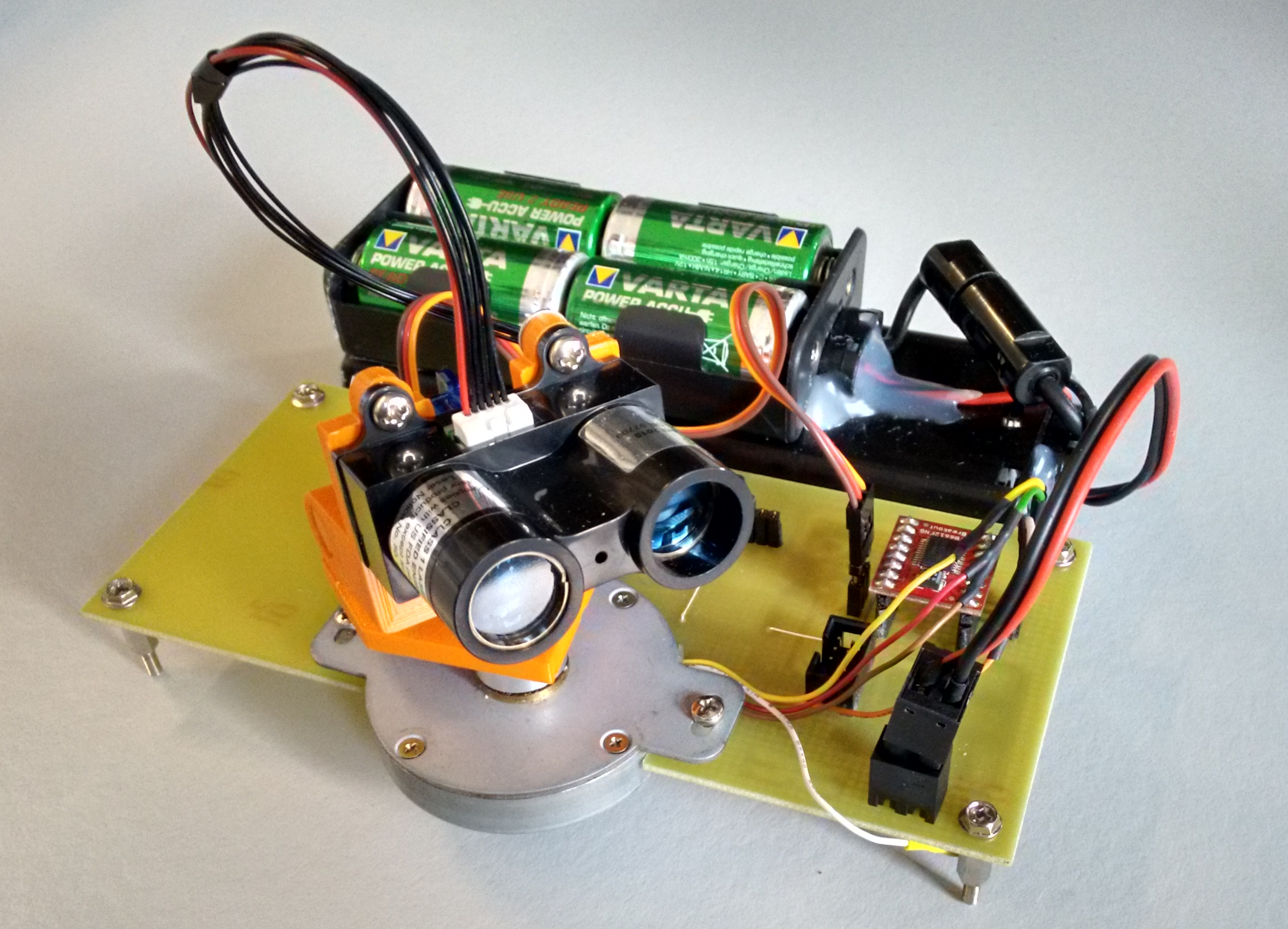
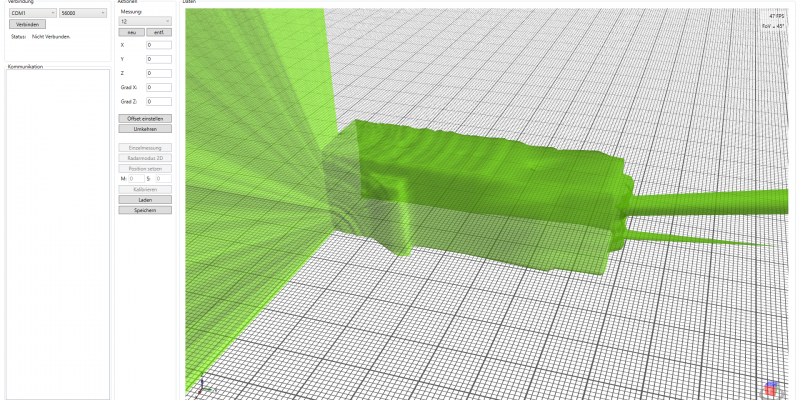
Der LIDAR Scanner wurde im Rahmen einer Seminararbeit erstellt. Das Gerät soll auf mobilen Robotern genutzt werden um ein 2D/3D Abbild der Umgebung zu erstellen. Der LIDAR Scanner nutzt, zum erfassen der Distanz, einen LIDAR-Lite Sensor der Firma Garmin. Dieser ist in der Lage, Entfernungen von bis zu 40 Metern zu messen. Der Messfehler beträgt dabei lediglich 2 Zentimeter. Für die Rotation des Sensors wird ein Schrittmotor in Verbindung mit einem Modelbauservo genutzt. Die Steuerung des Scanners übernimmt dabei ein ATmega328. Zur Kommunikation mit anderen Systemen wird UART (TTL 5V) genutzt. Der LIDAR Controller ist eine Anwendung zur Steuerung des LIDAR Scanners. Diese ist in C# geschrieben. Die Anwendung sendet Steuerbefehle an den LIDAR Scanner und nimmt alle Messdaten entgegen. Die erfassten Daten werden verarbeitet und als 3D-Modell dargestellt.
Die Software (inkl. Dokumentation) ist frei auf Github verfügbar.