März 27
2017
Laufroboter
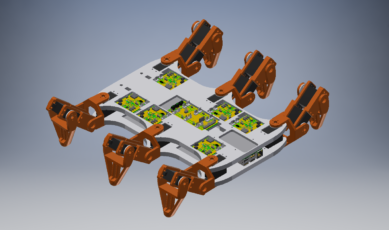
Der Laufroboter ist die aktuelle Bachelorarbeit von Alexander Miller. Zur Fortbewegung verwendet der Roboter 18 handelsübliche Modellbau Servos (Hitech 645MG). Damit besitzt jedes Bein 3 Gelenke. Die Steuerung von einem Bein übernimmt eine selbst entwickelte Platine. Auf dieser Platine befinden sich ein ATXMega32A4U und ein Sensor für die Strommessung (INA3221). Die Koordination der sechs Beine übernimmt ein Raspberry Pi 3 mit Windows 10 Iot als Betriebssystem.
Die Software, Schaltpläne, Layouts und 3-D-Modelle können bei Github runtergeladen werden.